
Description
Данное предложение не является публичной офертой и носит рекомендательный характер с целью подбора оптимальной комплектации оборудования. Комплектация оборудования может изменяться в соответствие с запросом Заказчика. Стоимость и состав предложения могут изменяться в соответствие с предложением Поставщика. Срок и условия поставки определяются индивидуально в зависимости от комплектации и количества запрашиваемого оборудования.
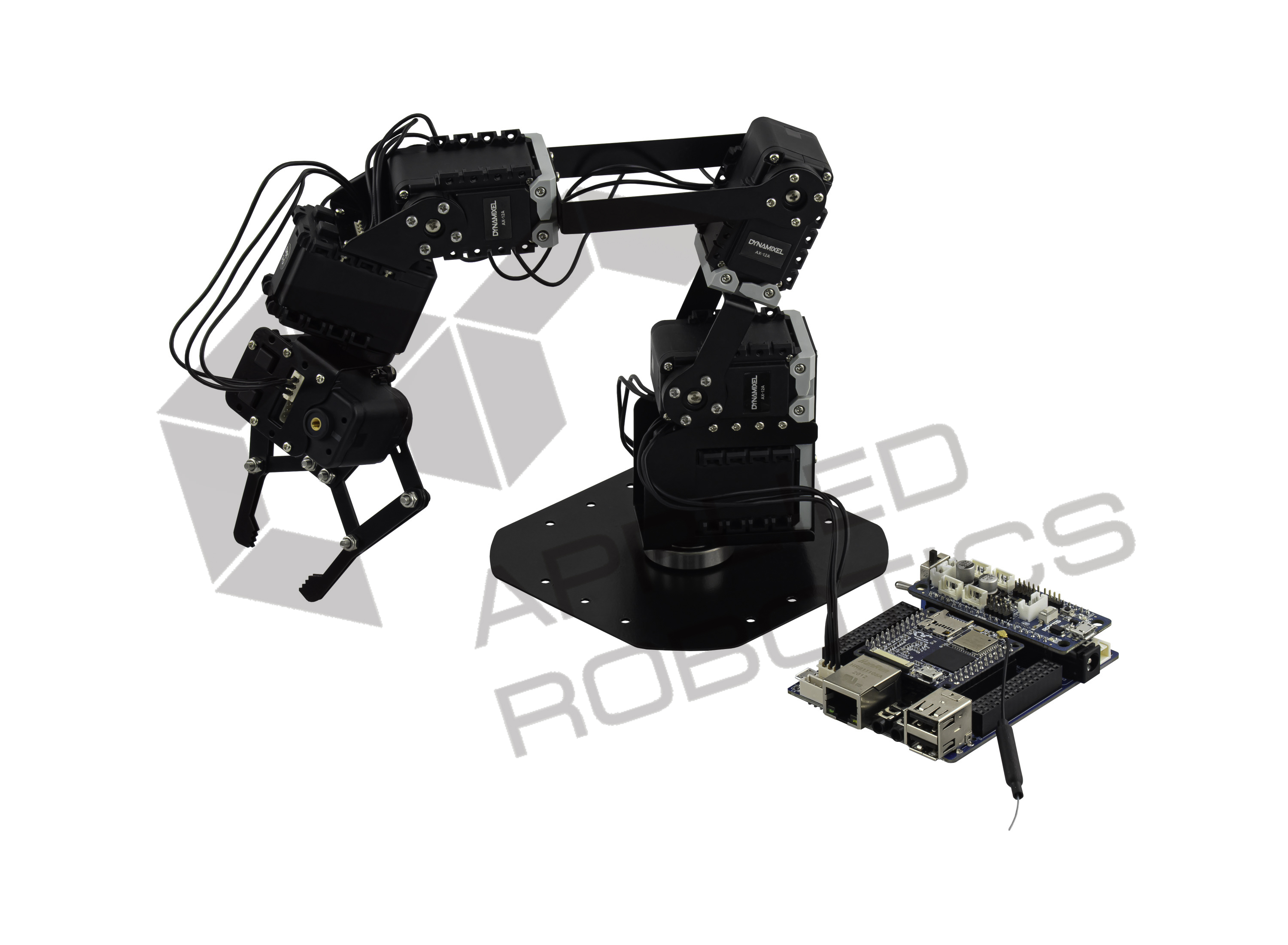
 Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов «Образовательный робототехнический комплект «СТЕМ Мастерская». Расширенный» предназначен для изучения основ разработки и конструирования моделей промышленных манипуляционных роботов различного типа и автономных мобильных роботов. В состав комплекта входят сервомодули, представляющие собой модели промышленных автоматизированных приводов со встроенной системой управления. Применение данного типа сервомодулей позволяет разрабатывать модели манипуляционных роботов с различными типами кинематической схемы, обладающих высокой точностью и динамикой движения.
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов «Образовательный робототехнический комплект «СТЕМ Мастерская». Расширенный» предназначен для изучения основ разработки и конструирования моделей промышленных манипуляционных роботов различного типа и автономных мобильных роботов. В состав комплекта входят сервомодули, представляющие собой модели промышленных автоматизированных приводов со встроенной системой управления. Применение данного типа сервомодулей позволяет разрабатывать модели манипуляционных роботов с различными типами кинематической схемы, обладающих высокой точностью и динамикой движения.
 Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов «Образовательный робототехнический комплект «СТЕМ Мастерская». Расширенный» позволит учащимся на примере собираемых из набора манипуляционных роботов ознакомиться с основными технологическими принципами, применяемыми на современном производстве, и научиться выполнять различные технологические операции с использованием ручных инструментов и специализированного оборудования. Путем использования данного комплекта в проектной деятельности и работе в команде, учащиеся изучат виды технологических операций на производстве, основы проектирования гибких производственных ячеек и разработки систем управления манипуляционными роботами. Также они узнают об инженерных профессиях и специальностях, необходимых на современном производстве и в Индустрии 4.0.
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов «Образовательный робототехнический комплект «СТЕМ Мастерская». Расширенный» позволит учащимся на примере собираемых из набора манипуляционных роботов ознакомиться с основными технологическими принципами, применяемыми на современном производстве, и научиться выполнять различные технологические операции с использованием ручных инструментов и специализированного оборудования. Путем использования данного комплекта в проектной деятельности и работе в команде, учащиеся изучат виды технологических операций на производстве, основы проектирования гибких производственных ячеек и разработки систем управления манипуляционными роботами. Также они узнают об инженерных профессиях и специальностях, необходимых на современном производстве и в Индустрии 4.0.

Комплектация
- Конструктивные элементы из металла для сборки модели манипуляционного робота с угловой кинематикой, 23 шт
- Конструктивные элементы из металла для сборки модели манипуляционного робота с плоско-параллельной кинематикой, 30 шт
- Конструктивные элементы из металла для сборки модели манипуляционного робота с DELTA кинематикой, 10 шт
- Крепежные элементы (винты различного номинала и длины), 64 шт
- Крепежные элементы (гайки различного номинала), 64 шт
- Элементы для создания шарнирных соединений, 7 шт
- Соединительные кабели различной длины, 7 шт
- Интеллектуальный сервомодуль с интегрированной системой управления, 7 шт
Сервомодуль представляет собой единый электромеханический модуль, включающий в себя привод на базе двигателя постоянного тока, понижающий редуктор, встроенную систему управления. Сервомодуль обладает интегрированной системой управления, обеспечивающей обратную связь, контроль параметров — положение вала, скорость вращения, нагрузка привода, а также обеспечивающей возможность последовательного подключения друг с другом и управления сервомодулями по последовательному полудуплексному асинхронному интерфейсу. Имеется режим постоянного вращения выходного вала.
Технические характеристики привода:
Нижняя граница диапазона допустимого напряжения питания — 9 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Передаточное отношение редуктора — 254. Максимальный момент — 1,5 Н*м. Нижняя граница диапазона номинальной скорости вращения в режиме постоянного вращения — 0 об/мин. Верхняя граница диапазона номинальной скорости вращения в режиме постоянного вращения — 59 об/мин. Максимальная величина угла поворота в режиме позиционного управления — 300 угловых градусов. Разрешающая способность — 0,29 угловых градусов. Размеры сервомодуля (ДхШхВ) — 32х50х40 мм. - Робототехнический контроллер, 1 шт
Робототехнический контроллер представляет собой модульное устройство, включающее в себя одноплатный микрокомпьютер для выполнения сложных вычислительных операций, периферийный контроллер для управления внешними устройствами и плату расширения для подключения внешних устройств. Модули робототехнического контроллера обладают одновременной конструктивной, аппаратной и программной совместимостью друг с другом. Имеется конструктивная, интерфейсная и электрическая совместимость робототехнического контроллера с опционально встраиваемым внешним микрокомпьютером.
Робототехнический контроллер обеспечивает возможность программирования с помощью средств языков С/С++, Python и свободно распространяемой среды Arduino IDE, а также управления моделями робототехнических систем с помощью среды ROS. Количество портов для подключения опционально встраиваемого внешнего микрокомпьютера — 48 шт. Имеется встроенный опциональный микрокомпьютер.
Технические характеристики робототехнического контроллера:
Нижняя граница диапазона питания внешней аккумуляторной батареи — 6,8 В. Верхняя граница диапазона питания внешней аккумуляторной батареи — 12 В. Порты для подключения внешних цифровых устройств — 16 шт. Порты для подключения внешних аналоговых устройств — 10 шт. Интерфейс 1-wire TTL для подключения по последовательному интерфейсу — 1 шт. Кол-во портов тип 4pin для подключения сервомодулей по последовательному интерфейсу — 2 шт. Программируемые кнопки — 1 шт. Интерфейс PWM — 1 шт. Интерфейс UART — 4 шт. Интерфейс I2C — 2 шт. Интерфейс SPI — 2 шт. Интерфейс для подключения микрофона — 1 шт. Интерфейс для подключения динамиков — 1 шт.
Технические характеристики встроенного опционального микрокомпьютера:
Количество вычислительных процессорных ядер — 4 шт. Оперативная память — 512 МБайт. Имеется встроенные интерфейсы WiFi и Bluetooth. Количество слотов для подключения карты памяти microSD — 1 шт. Встроенный микрофон — 1 шт.
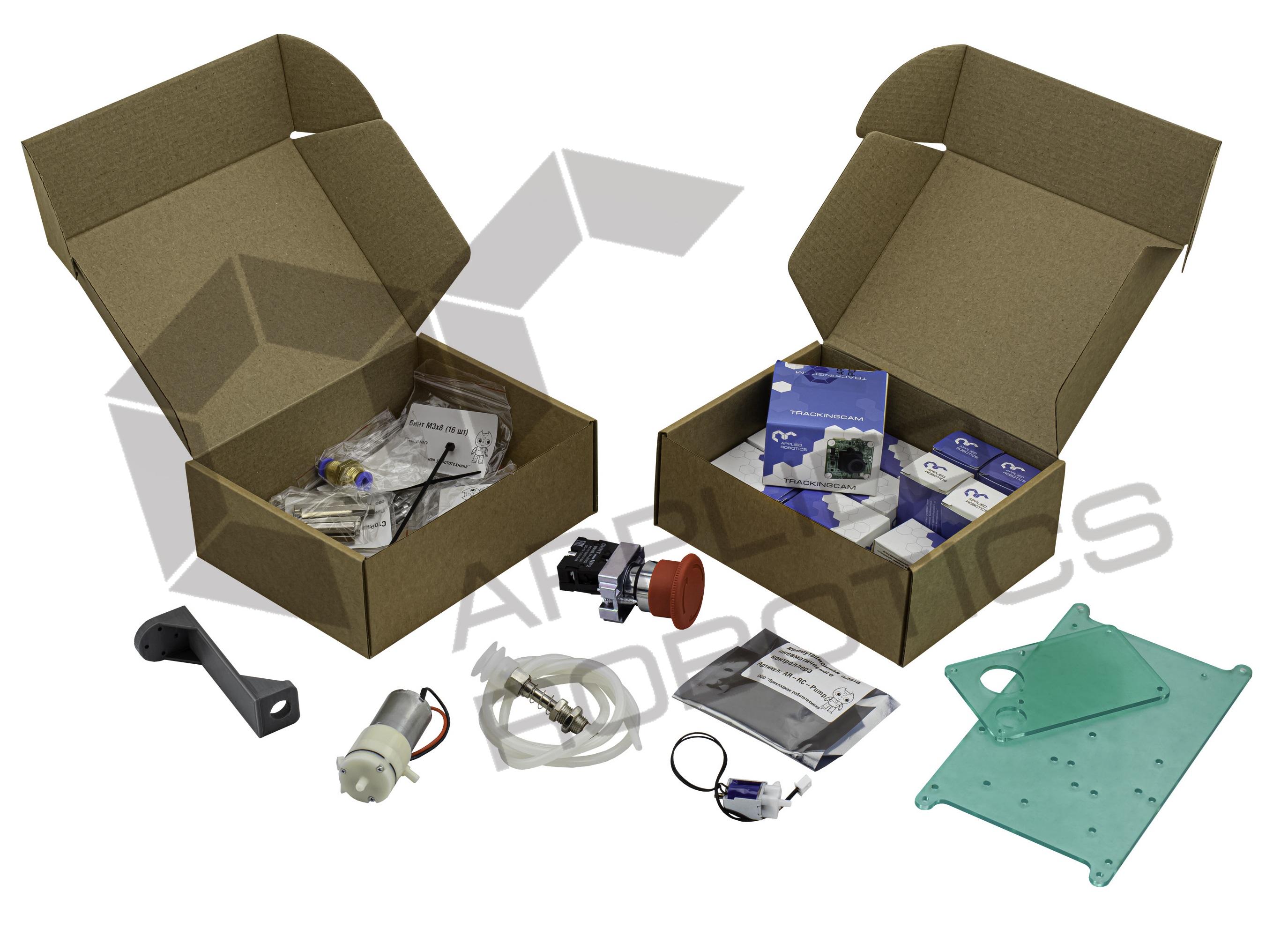
- Комплект для сборки пневмосистемы, 1 шт
Конструктивные элементы из пластика для сборки каркаса пневмосистемы — 2 шт. Крепежные элементы (винты, гайки, стойки, стяжки) — 30 шт. Коммутационные кабели (тип «Папа-Папа» и «Папа-Мама») — 10 шт. Коммутационная плата пневмосистемы, 1 шт.
Технические характеристики коммутационной платы пневмосистемы:
Количество линий +5В — 2 шт. Количество линий 0В — 2 шт. Количество выводов для коммутации силовой нагрузки с прямым управлением — 2 шт. Количество линий управления силовой нагрузкой — 2 шт. Количество индикаторов — 3 шт. Габариты — 43х33х12 мм.
Комплект вакуумного захвата — 1 шт. Технические характеристики комплекта вакуумного захвата:
Тип захвата — вакуумная присоска. Вакуумная присоска — 1 шт. Электромагнитный клапан — 1 шт. Вакуумный насос — 1 шт. Виниловая трубка — 1 м.
Напряжение питания — 5 В. Кнопочный выключатель с фиксацией — 1 шт. Коммутационный пневмосоединитель — 1 шт. - Универсальный вычислительный модуль, 1 шт
Универсальный вычислительный модуль представляет собой микропроцессорное устройство, предназначенное для управления устройствами, входящими в состав образовательного робототехнического комплекта. Имеется возможность подключения сервомодулей по последовательному интерфейсу. Интерфейс 1-wire TTL для подключения по последовательному интерфейсу — 1 шт. Размеры (ДхШ) — 40х40 мм. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Объем Flash памяти — 256 Кбайт. Тактовая частота процессора — 16 МГц. Кол-во портов тип USB — 2 шт. Кол-во цифровых портов «Ввода-Вывода» — 12 шт. Кол-во аналоговых портов — 16 шт. Интерфейс UART — 1 шт. Интерфейс I2C — 1 шт. Интерфейс SPI — 1 шт. Линия питания «+12В» — 1 шт. Линия питания «+5В» — 1 шт. Линия питания «+3,3В» — 1 шт. Линия питания «Земля» — 1 шт. Светодиодный индикатор — 1 шт. Имеется беспроводной интерфейс WiFi и беспроводной интерфейс Bluetooth. Переключатель — 1 шт. Кнопка — 3 шт. - Плата расширения универсального вычислительного модуля, 1 шт
Плата расширения обеспечивает возможность подключения универсального вычислительного модуля к сети посредством интерфейса Ethernet. Габариты (ДхШ) — 40х40 мм. Напряжение питания — 5 В. Кол-во портов «Ввода-Вывода» — 40 шт. Интерфейс Ethernet — 1 шт. Интерфейс SPI — 1 шт. Интерфейс подключения карты microSD — 1 шт. Светодиодный индикатор — 4 шт. Кнопка — 1 шт. - Модуль технического зрения, 1 шт
Модуль технического зрения представляет собой вычислительное устройство со встроенным микроконтроллером, интегрированной телекамерой и оптической системой. Имеется возможность коммуникации с аналогичными модулями посредством шины на базе последовательного интерфейса с целью дальнейшей передачи результатов измерений группы модулей на управляющее вычислительное устройство, подключенное к данной шине. Встроенное программное обеспечение позволяет осуществлять настройку модуля технического зрения — настройку экспозиции, баланса белого, цветоразностных составляющих, площади обнаруживаемой области изображения, округлости обнаруживаемой области изображения, положение обнаруживаемых областей относительно друг друга.
Технические характеристики модуля технического зрения:
Размеры модуля (ДхШхВ) — 38х38х32 мм. Интерфейс USB для настройки модуля — 1 шт. Разрешение видеопотока, передаваемого по интерфейсу USB — 640х480 пикселей. Кол-во градаций цветовой палитры — 65536. Кол-во различных объектов, обнаруживаемых одновременно в секторе обзора модуля — 10 шт. Порт питания +5В — 2 шт. Порт тип GND «земля» — 2 шт. Интерфейс UART — 1 шт. Интерфейс I2C — 1 шт. Интерфейс SPI — 1 шт. Коммуникационный интерфейс 1-wire TTL для связи по последовательной шине — 1 шт. - Адаптер питания от сети 220 В, 1 шт.
- Сетевой кабель адаптера питания, 1 шт.
- USB интерфейсный кабель для программирования программируемого контроллера, 1 шт.
- Модуль тактовой кнопки, 3 шт
Размеры (ДхШ) — 12х12 мм. Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Модуль светодиода, 3 шт
Размеры светодиода (ДхШ) — 3,5х2,8 мм. Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры модуля (ДхШ) — 40х26 мм. - Модуль концевого прерывателя, 3 шт
Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Модуль датчика цвета, 1 шт.
Количество цветовых каналов — 3 шт. Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Модуль RGB светодиода, 3 шт.
Количество цветовых каналов — 3 шт. Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Программное обеспечение для визуализации 3D моделей манипуляционного робота
Программное обеспечение обеспечивает трехмерную визуализацию модели манипуляционного робота (с угловой, плоскопараллельной и дельта-кинематикой) в процессе работы, обеспечивать построение пространственной траектории движения исполнительного механизма манипуляционного робота, возможность задания последовательности точек для прохождения через них исполнительного механизма манипуляционного робота. Программное обеспечение функционирует, как в отдельности в виде среды моделирования, так и в режиме мониторинга в реальном времени при подключении модели манипулятора посредством робототехнического контроллера. Программное обеспечение обеспечивает возможность построения графиков заданных и текущих обобщенных координат манипуляционного робота, графиков значений скоростей и ускорения, графиков расчетных значений нагрузки. Программное обеспечение позволяет задавать последовательность передвижений манипулятора посредством набора команд в блочно-графическом интерфейсе. - Учебное пособие на русском языке, 2 шт
В состав набора входит учебный комплект, включающий в себя учебное пособие, набор библиотек трехмерных элементов для прототипирования моделей манипуляционных роботов, а также программное обеспечение для работы с набором. Учебное пособие содержит материалы по разработке трехмерных моделей мобильных роботов, манипуляционных роботов с различными типами кинематики (угловая кинематика, плоско-параллельная кинематика, дельта-кинематика, SCARA (рычажная кинематика), платформа Стюарта), инструкции по проектированию роботов, инструкции и методики осуществления инженерных расчетов при проектировании (расчеты нагрузки и моментов, расчет мощности приводов, расчет параметров кинематики), инструкции по разработке систем управления и программного обеспечения для управления роботами, инструкции и методики по разработке систем управления с элементами искусственного интеллекта и машинного обучения.
На начальном этапе учащиеся могут разрабатывать модели роботов и программировать их с использованием блочно-графической среды программирования.
На среднем этапе учащиеся могут программировать модели роботов с использованием среды программирования Arduino IDE, используя отечественный робототехнический контроллер.
В рамках начального и среднего этапа учащиеся могут применять аддитивные технологии в процессе разработки и изготовления конструкции робота. Начиная с начального этапа, учащиеся могут также разрабатывать модели автономных роботов с использованием различных сенсорных устройств, в том числе систем технического зрения на базе отечественного модуля.
В рамках старшего этапа учащиеся могут расширить функционал программируемого контроллера за счет установки модуля расширения на базе микрокомпьютера с ОС Linux. Благодаря этому появляется возможность изучать основы разработки робототехнических систем с системами управления на базе ОС реального времени или типа Linux, а также изучать методы сбора и анализа визуальной информации, принципы дистанционного управления и интеграции робототехнических комплексов в системы типа Индустрия 4.0 и Интернет Вещей.



