Description
Описание:
Защита от влаги
B1 способен погружаться в воду и двигаться на глубине до 1 метра в течение 30 минут. При продвинутой степени защиты робот полностью водонепроницаем и готов к длительной работе под водой.
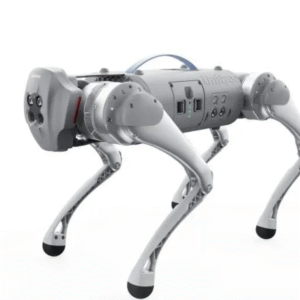
Надежная бионика
Робот свободно поднимается и спускается по лестницам, преодолевает препятствия высотой до 22 см. Автоматически поднимается при перевороте на спину. B1 переносит до 20 кг, а максимальная нагрузка без движения ― 80 кг. Робот адаптирован к выполнению задач в непогоду, рабочая температура ― от -5°С до +45°С.
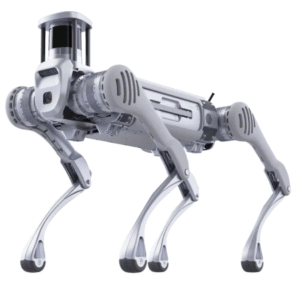
Точная навигация
С помощью многомерного зрения и датчиков B1 быстро ориентируется в пространстве, прокладывает маршрут, считывает показания приборов. Есть поддержка GPS, Beidou и других систем спутникового позиционирования.
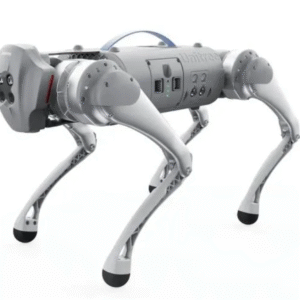
Адаптируемость к задачам
Робот адаптируется к большому кругу задач за счет установки дополнительных модулей: руки-манипулятора, навигационной платформы и пр.
Характеристики:
| Физические хар-ки | |
| Размеры (стоя) | 1126 * 467 * 671 мм |
| Класс защиты | IP67 (опционально IP 68) |
| Вес (с аккамулятором) | 50 кг |
| Мобильность | |
| Максимальная скорость | 4.3 км/ч |
| Грузоподъемность (максимальная) | 50 кг |
| Грузоподъемность (рабочая) | 20 кг |
| Макс.высота преодолеваемого препятствия | 20 см |
| Угол подъема по наклонной поверхности | 35° |
| Электрические хар-ки | |
| Емкость акб | 18000 мАч |
| Время работы | 5 часов |
| Напряжение питания робота | 51.8В |
| Напряжение зарядки аккамулятора | 58.8В |
| Ток зарядки аккамулятора | 12А |
| Поддержка беспроводной зарядной станции | — |
| Аппаратная составляющая | |
| Количество бортовых компьютеров | 4 |
| Бортовой компьютер (Motion PC) | miniPC на базе Intel core I5 |
| Бортовой компьютер (Perciption PC) | — |
| Бортовой компьютер (Development PC) | — |
| Бортовой компьютер (AI PC) | — |
| Доп. Бортовые компьютеры | 3х Nvidia Jetson Xavier NX |
| Интерфейсы подключения | |
| WiFi | — |
| Bluetooth | — |
| Sim или E-Sim | — |
| Физические интерфейсы подключения | 6 x Gigabit Network Port, 4 x RS485, 5 x USB, 4 x CAN |
| Сенсоры | |
| Лидар | [ОПЦИОНАЛЬНО RoboSense RS-LiDAR-16] |
| Лидар дополнительный | — |
| Камера широкоугольная | — |
| Камера глубины | 5 x Intel D430 |
| Доп.датчики | — |
| Программное обеспечение | |
| Программирование посредством SDK | + |
| Программирование посредством ROS | + |
| SLAM-режим | — |
| Обход препятствий | — |
| Автономная постановка на зарядку | — |
| Простейшие сценарии (танец, бег, лестница, переворот, пр.) | + |
| Голосовые функции (общение, команды, воспроизведение музыки) | — |
| Интеллектуальный подъем по лестнице | — |